Building a Snakeboard for my Mecatronics project
Projects
Project Management
Back in engineering school, during the scholar year of 2013-2014, I led a 25 people team to build a robot from scratch with a 2000€ budget. Our client was a parisian robotics laboratory.
That project was a year-long class part of my engineering curriculum. The goal of the class was to combine electronics and mechanics with waterfall project management, thus giving us unforgettable memories.
Being the project manager, I had to gather the specifications, derive the Work Breakdown Structure, build a Roadmap, conduct the functional analysis, handle stakeholders and then engage the team weekly to make sure we would deliver on time.
Mechanics
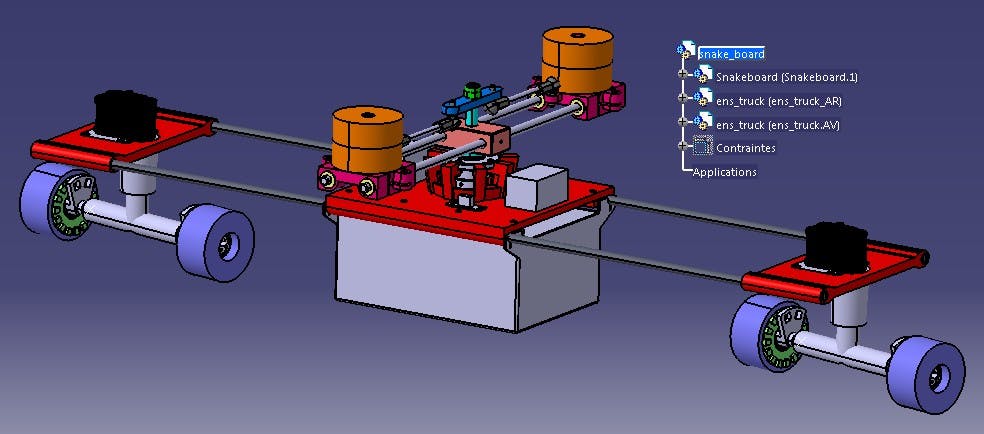
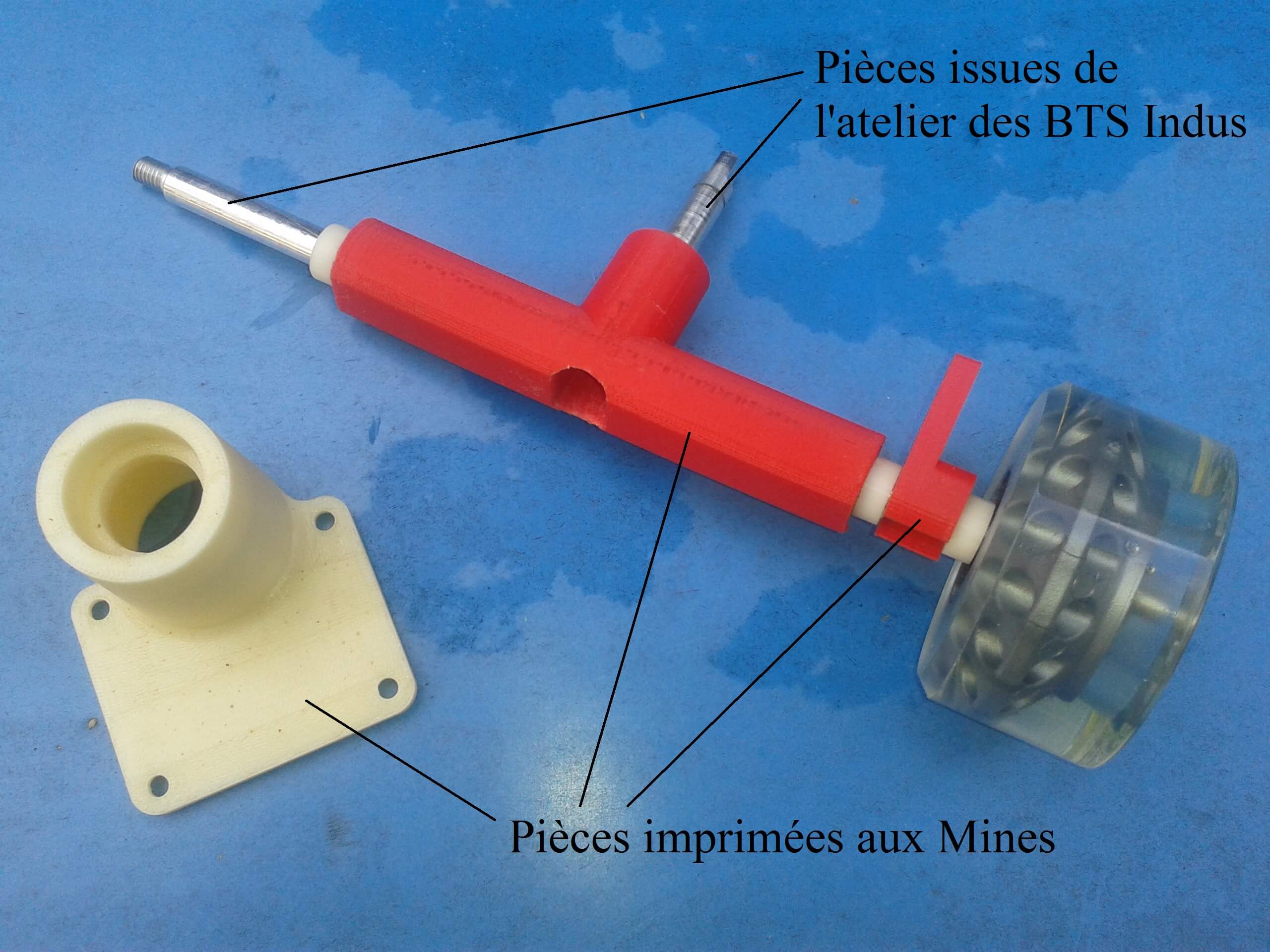
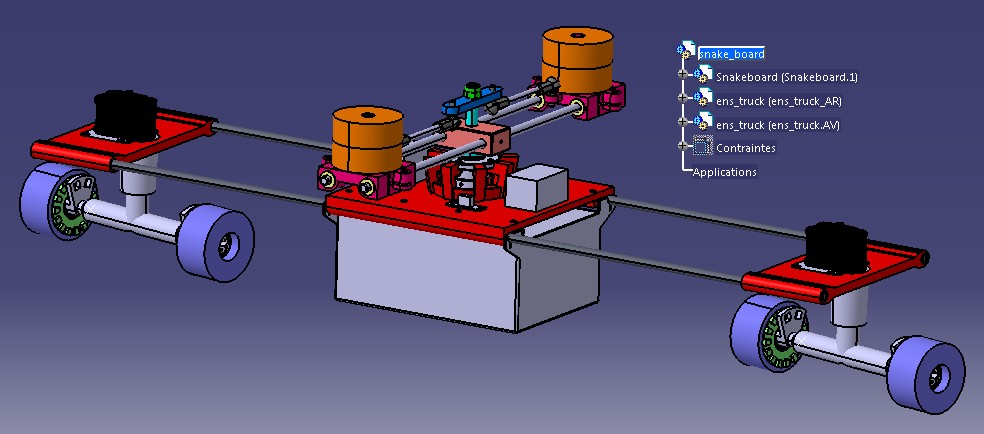
The mechanics team worked on dimensioning the motors, designing the robot in CAD software, and 3D-printing and assembling the parts.
Electronics
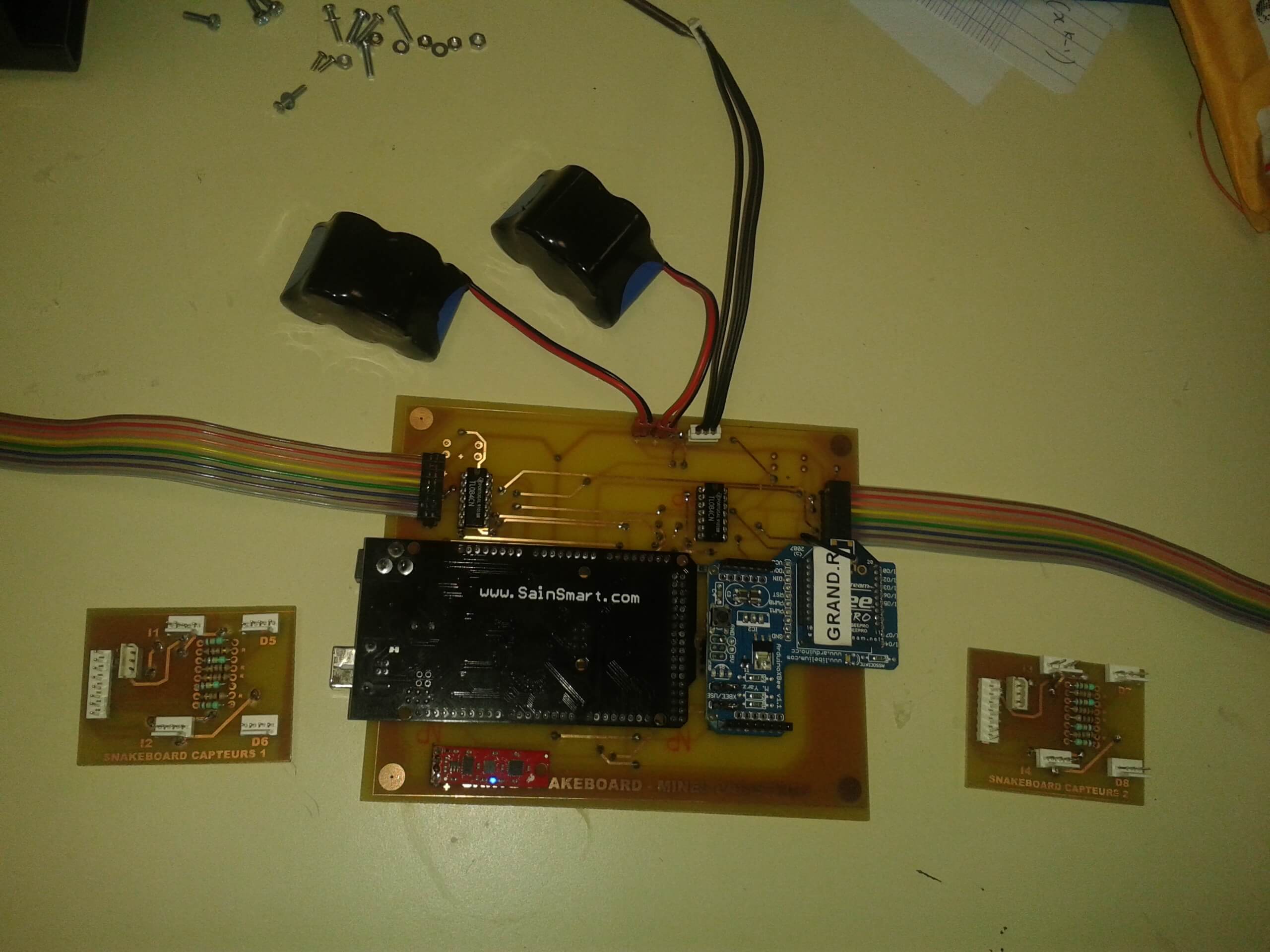
The electronics team worked on wireless communications using Xbee and Arduino, dimensioning the batteries, controlling the motors from the Arduino micro-controller, selecting sensors (optical sensors and inertial measurement unit), and finally designing, printing and soldering the 3 PCBs (printed circuit boards).
Movie
Here is the final movie (in french) a few weeks before demo-day. In that video, the snakeboard is not finalised but we finished on time and delivered the robot to the research lab.